|
Reflexxes Motion Libraries
Manual and Documentation (Type II, Version 1.2.6)
|
|
Reflexxes Motion Libraries
Manual and Documentation (Type II, Version 1.2.6)
|
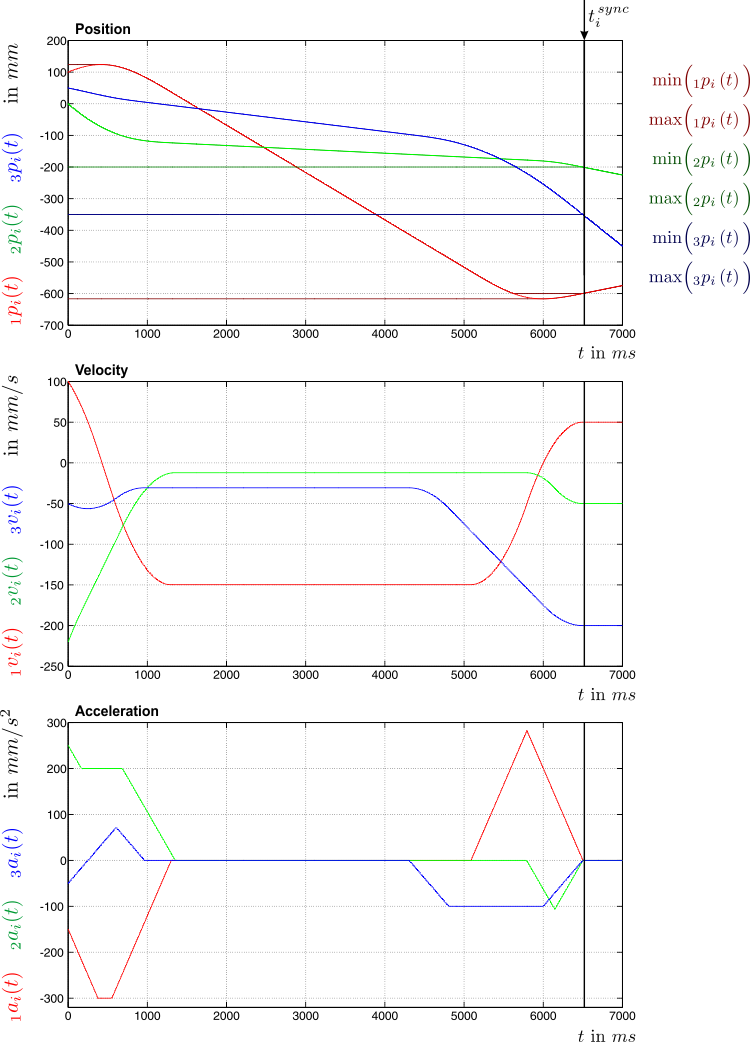
Below, you can find the source code of a sample application that makes use of the position-based Reflexxes Type II algorithm and shows, how to use the optional input parameter RMLInputParameters::MinimumSynchronizationTime. The example is based on Example 2 and shows the input parameters for the position-based algorithm that computes a trajectory with an execution time of 6.5 seconds. The source file can be found in the folder
/src/RMLPositionSampleApplications/07_RMLPositionSampleApplication.cpp
The resulting trajectory of this sample program is displayed below the source code.
// ---------------------- Doxygen info ---------------------- // ---------------------------------------------------------- // For a convenient reading of this file's source code, // please use a tab width of four characters. // ---------------------------------------------------------- #include <stdio.h> #include <stdlib.h> #include <ReflexxesAPI.h> #include <RMLPositionFlags.h> #include <RMLPositionInputParameters.h> #include <RMLPositionOutputParameters.h> //************************************************************************* // defines #define CYCLE_TIME_IN_SECONDS 0.001 #define NUMBER_OF_DOFS 3 //************************************************************************* // Main function to run the process that contains the test application // // This function contains source code to get started with the Type II // Reflexxes Motion Library. Based on the program // 01_RMLPositionSampleApplication.cpp, this sample code becomes extended by // using (and describing) all available output values of the algorithm. // As in the former example, we compute a trajectory for a system with // three degrees of freedom starting from an arbitrary state of motion. // This code snippet again directly corresponds to the example trajectories // shown in the documentation. //************************************************************************* int main() { // ******************************************************************** // Variable declarations and definitions bool FirstCycleCompleted = false ; int ResultValue = 0 , i = 0 , j = 0 ; ReflexxesAPI *RML = NULL ; RMLPositionInputParameters *IP = NULL ; RMLPositionOutputParameters *OP = NULL ; RMLPositionFlags Flags ; // ******************************************************************** // Creating all relevant objects of the Type II Reflexxes Motion Library RML = new ReflexxesAPI( NUMBER_OF_DOFS , CYCLE_TIME_IN_SECONDS ); IP = new RMLPositionInputParameters( NUMBER_OF_DOFS ); OP = new RMLPositionOutputParameters( NUMBER_OF_DOFS ); // ******************************************************************** // Set-up a timer with a period of one millisecond // (not implemented in this example in order to keep it simple) // ******************************************************************** printf("-------------------------------------------------------\n" ); printf("Reflexxes Motion Libraries \n" ); printf("Example: 07_RMLPositionSampleApplication.cpp \n\n"); printf("This example demonstrates the use of the entire output \n" ); printf("values of the position-based Online Trajectory \n" ); printf("Generation algorithm of the Type II Reflexxes Motion \n" ); printf("Library. \n\n"); printf("Copyright (C) 2014 Reflexxes GmbH \n" ); printf("-------------------------------------------------------\n" ); // ******************************************************************** // Set-up the input parameters // In this test program, arbitrary values are chosen. If executed on a // real robot or mechanical system, the position is read and stored in // an RMLPositionInputParameters::CurrentPositionVector vector object. // For the very first motion after starting the controller, velocities // and acceleration are commonly set to zero. The desired target state // of motion and the motion constraints depend on the robot and the // current task/application. // The internal data structures make use of native C data types // (e.g., IP->CurrentPositionVector->VecData is a pointer to // an array of NUMBER_OF_DOFS double values), such that the Reflexxes // Library can be used in a universal way. IP->CurrentPositionVector->VecData [0] = 100.0 ; IP->CurrentPositionVector->VecData [1] = 0.0 ; IP->CurrentPositionVector->VecData [2] = 50.0 ; IP->CurrentVelocityVector->VecData [0] = 100.0 ; IP->CurrentVelocityVector->VecData [1] = -220.0 ; IP->CurrentVelocityVector->VecData [2] = -50.0 ; IP->CurrentAccelerationVector->VecData [0] = -150.0 ; IP->CurrentAccelerationVector->VecData [1] = 250.0 ; IP->CurrentAccelerationVector->VecData [2] = -50.0 ; IP->MaxVelocityVector->VecData [0] = 300.0 ; IP->MaxVelocityVector->VecData [1] = 100.0 ; IP->MaxVelocityVector->VecData [2] = 300.0 ; IP->MaxAccelerationVector->VecData [0] = 300.0 ; IP->MaxAccelerationVector->VecData [1] = 200.0 ; IP->MaxAccelerationVector->VecData [2] = 100.0 ; IP->MaxJerkVector->VecData [0] = 400.0 ; IP->MaxJerkVector->VecData [1] = 300.0 ; IP->MaxJerkVector->VecData [2] = 200.0 ; IP->TargetPositionVector->VecData [0] = -600.0 ; IP->TargetPositionVector->VecData [1] = -200.0 ; IP->TargetPositionVector->VecData [2] = -350.0 ; IP->TargetVelocityVector->VecData [0] = 50.0 ; IP->TargetVelocityVector->VecData [1] = -50.0 ; IP->TargetVelocityVector->VecData [2] = -200.0 ; IP->SelectionVector->VecData [0] = true ; IP->SelectionVector->VecData [1] = true ; IP->SelectionVector->VecData [2] = true ; // ******************************************************************** // Specifying the minimum synchronization time IP->MinimumSynchronizationTime = 6.5 ; // ******************************************************************** // Checking the input parameters (optional) if (IP->CheckForValidity()) { printf("Input values are valid!\n"); } else { printf("Input values are INVALID!\n"); } // ******************************************************************** // Starting the control loop while (ResultValue != ReflexxesAPI::RML_FINAL_STATE_REACHED) { // **************************************************************** // Wait for the next timer tick // (not implemented in this example in order to keep it simple) // **************************************************************** // Calling the Reflexxes OTG algorithm ResultValue = RML->RMLPosition( *IP , OP , Flags ); if (ResultValue < 0) { printf("An error occurred (%d).\n", ResultValue ); break; } // **************************************************************** // The following part completely describes all output values // of the Reflexxes Type II Online Trajectory Generation // algorithm. if (!FirstCycleCompleted) { FirstCycleCompleted = true; printf("-------------------------------------------------------\n"); printf("General information:\n\n"); printf("The execution time of the current trajectory is %.3lf seconds.\n", OP->GetSynchronizationTime()); if (OP->IsTrajectoryPhaseSynchronized()) { printf("The current trajectory is phase-synchronized.\n"); } else { printf("The current trajectory is time-synchronized.\n"); } if (OP->WasACompleteComputationPerformedDuringTheLastCycle()) { printf("The trajectory was computed during the last computation cycle.\n"); } else { printf("The input values did not change, and a new computation of the trajectory parameters was not required.\n"); } printf("-------------------------------------------------------\n"); printf("New state of motion:\n\n"); printf("New position/pose vector : "); for ( j = 0; j < NUMBER_OF_DOFS; j++) { printf("%10.3lf ", OP->NewPositionVector->VecData[j]); } printf("\n"); printf("New velocity vector : "); for ( j = 0; j < NUMBER_OF_DOFS; j++) { printf("%10.3lf ", OP->NewVelocityVector->VecData[j]); } printf("\n"); printf("New acceleration vector : "); for ( j = 0; j < NUMBER_OF_DOFS; j++) { printf("%10.3lf ", OP->NewAccelerationVector->VecData[j]); } printf("\n"); printf("-------------------------------------------------------\n"); printf("Extremes of the current trajectory:\n"); for ( i = 0; i < NUMBER_OF_DOFS; i++) { printf("\n"); printf("Degree of freedom : %d\n", i); printf("Minimum position : %10.3lf\n", OP->MinPosExtremaPositionVectorOnly->VecData[i]); printf("Time, at which the minimum will be reached: %10.3lf\n", OP->MinExtremaTimesVector->VecData[i]); printf("Position/pose vector at this time : "); for ( j = 0; j < NUMBER_OF_DOFS; j++) { printf("%10.3lf ", OP->MinPosExtremaPositionVectorArray[i]->VecData[j]); } printf("\n"); printf("Velocity vector at this time : "); for ( j = 0; j < NUMBER_OF_DOFS; j++) { printf("%10.3lf ", OP->MinPosExtremaVelocityVectorArray[i]->VecData[j]); } printf("\n"); printf("Acceleration vector at this time : "); for ( j = 0; j < NUMBER_OF_DOFS; j++) { printf("%10.3lf ", OP->MinPosExtremaAccelerationVectorArray[i]->VecData[j]); } printf("\n"); printf("Maximum position : %10.3lf\n", OP->MaxPosExtremaPositionVectorOnly->VecData[i]); printf("Time, at which the maximum will be reached: %10.3lf\n", OP->MaxExtremaTimesVector->VecData[i]); printf("Position/pose vector at this time : "); for ( j = 0; j < NUMBER_OF_DOFS; j++) { printf("%10.3lf ", OP->MaxPosExtremaPositionVectorArray[i]->VecData[j]); } printf("\n"); printf("Velocity vector at this time : "); for ( j = 0; j < NUMBER_OF_DOFS; j++) { printf("%10.3lf ", OP->MaxPosExtremaVelocityVectorArray[i]->VecData[j]); } printf("\n"); printf("Acceleration vector at this time : "); for ( j = 0; j < NUMBER_OF_DOFS; j++) { printf("%10.3lf ", OP->MaxPosExtremaAccelerationVectorArray[i]->VecData[j]); } printf("\n"); } printf("-------------------------------------------------------\n"); } // **************************************************************** // **************************************************************** // Feed the output values of the current control cycle back to // input values of the next control cycle *IP->CurrentPositionVector = *OP->NewPositionVector ; *IP->CurrentVelocityVector = *OP->NewVelocityVector ; *IP->CurrentAccelerationVector = *OP->NewAccelerationVector ; } // ******************************************************************** // Deleting the objects of the Reflexxes Motion Library end terminating // the process delete RML ; delete IP ; delete OP ; exit(EXIT_SUCCESS) ; }