Introduction
The Reflexxes Motion Libraries are designed to achieve new opportunities in sensor-based motion control opening the door to new applications, safe human-robot interaction, and advanced robot motion capabilities. The three key features of these libraries are:
- Jerk-limited robot motions can be calculated from arbitrary initial states of motion (i.e., during any motion).
- New motions are calculated within one low-level control cycle (typically within one millisecond or less).
- The interface is very simple and clear, such that it can easily be integrated in existing systems.
Based on the Reflexxes framework, the following new motion control features can be realized with the Reflexxes Motion Libraries:
- Instantaneous changes of coordinate frames
- Instantaneous changes of control state spaces
- Deterministic, instantaneous reactions to sensor signals
- Safe and stable reactions to sensor failures
- Simple and robust visual servo control
- Stable switched-system control
All these features let robots and mechanical systems instantaneously react to unforeseen events and enable new opportunities for sensor-based robot motion control — and and thus helping to realize new and advanced robot and motion control applications.
Overview
This page gives an overview about
- the Reflexxes Type II Motion Library and
- the Reflexxes Type IV Motion Library.
Each Reflexxes Motion Library contains a set of On-Line Trajectory Generation (OTG) algorithms that are designed to control robots and mechanical systems in order to take advantage of the features above. A description is also provided in:
T. Kroeger.
Opening the Door to New Sensor-based Robot Applications — The Reflexxes Motion Libraries.
In Proc. of the IEEE International Conference on Robotics and Automation, Shanghai, China, May 2011.
The difference between Type II and Type IV is the usage of jerk-limitation and the consideration of initial acceleration values in the Type IV library.
Type II Reflexxes Motion Library
-
The Type II Reflexxes Motion Library is released as open source software under the GNU Lesser General Public License.
-
Includes Type I
-
Position-based Type II On-Line Trajectory Generation (OTG) algorithm
-
Acceleration limitation
-
Time- and phase-synchronization
-
Time-optimal trajectories
-
The desired target state of motion at the end of each motion trajectory only consists of a desired position/pose/vector and velocity vector.
-
Input and output values:

Input and output values of the position-based Type II On-Line Trajectory Generation algorithm.
-
Velocity-based Type II On-Line Trajectory Generation (OTG) algorithm
-
Acceleration limitation
-
Time-optimal trajectories
-
Input and output values:
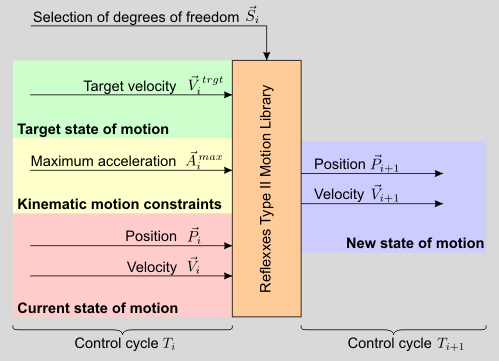
Input and output values of the velocity-based Type II On-Line Trajectory Generation algorithm.
Reflexxes Type IV Motion Library
-
Freely available for research and education: http://www.reflexxes.com/products/academic-version.
-
Includes Type I, Type II, and Type III
-
Position-based On-Line Trajectory Generation (OTG) algorithm
-
Jerk limitation
-
Time- and phase-synchronization
-
Time-optimal trajectories
-
The desired target state of motion at the end of each motion trajectory consists of a desired position/pose/vector and a desired velocity vector.
-
Input and output values:
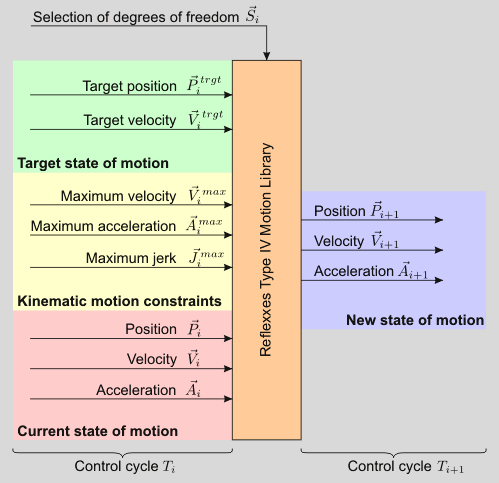
Input and output values of the position-based Type IV On-Line Trajectory Generation algorithm.
-
Velocity-based On-Line Trajectory Generation (OTG) algorithm
-
Jerk limitation
-
Time-optimal trajectories
-
Input and output values:
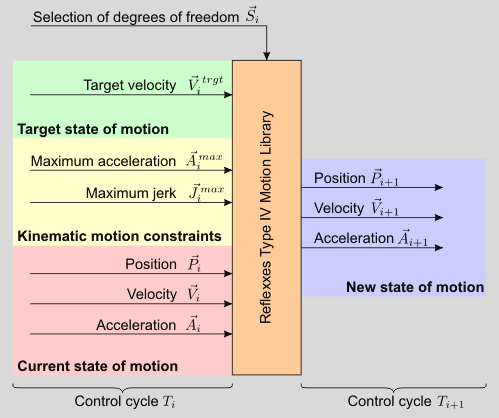
Input and output values of the velocity-based Type IV On-Line Trajectory Generation algorithm.
Further types are being developed and will be available in the future. An overview about all types of On-Line Trajectory Generation algorithms can be found in
T. Kroeger.
On-Line Trajectory Generation in Robotic Systems.
Springer Tracts in Advanced Robotics, Vol. 58, Springer, January 2010.
http://www.springer.com/978-3-642-05174-6.
This on-line documentation entirely describes the implementation of the Type II Reflexxes Motion Library.
