 |
Reflexxes Motion Libraries
Manual and Documentation (Type II, Version 1.2.6)
|
|
Reflexxes Motion Libraries
Manual and Documentation (Type II, Version 1.2.6)
|
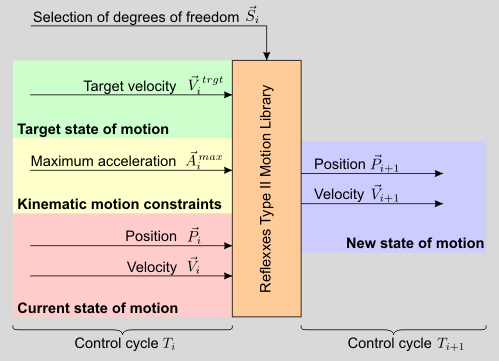
After calling the position-based On-Line Trajectory Generation (OTG) algorithm with ReflexxesAPI::RMLPosition(), the output values can be read from the class RMLPositionOutputParameters. The output values of the velocity-based On-Line Trajectory Generation algorithm, which is called with ReflexxesAPI::RMLVelocity() can be read from the class RMLVelocityOutputParameters. For a detailed description of these classes, please refer to the class documentation, and for a description of the input values of the Reflexxes Motion Library, please refer to the Description of Input Values.
This page contains two main sections with one example each:

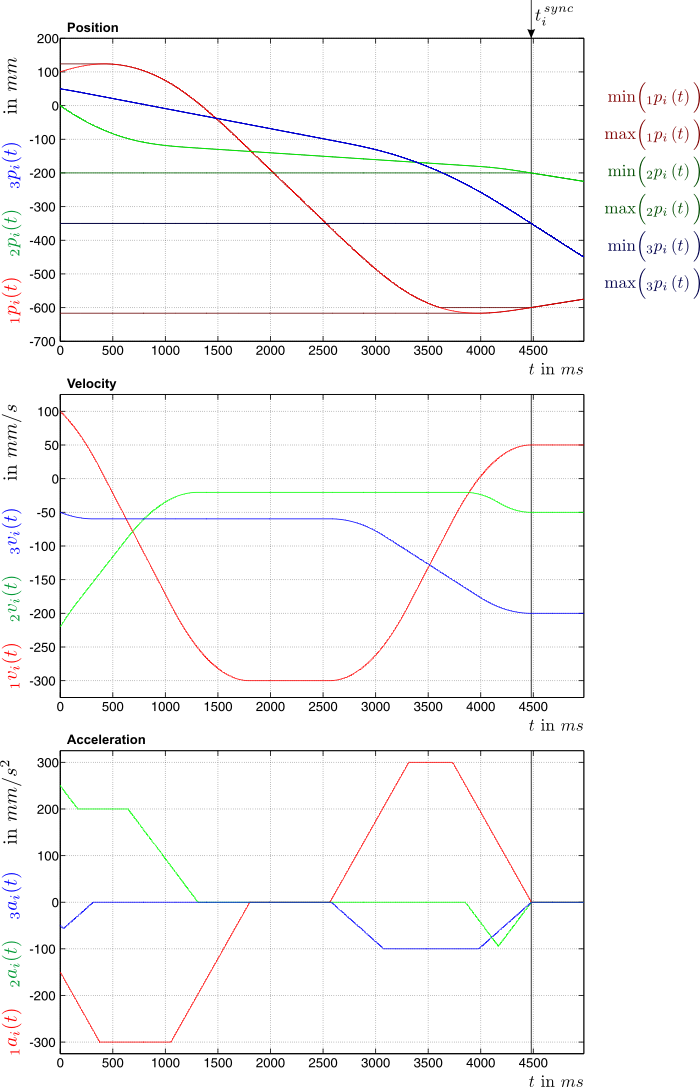
The position-based Type II On-Line Trajectory Generation algorithm called at a time instant  computes the following output values (cf. RMLPositionOutputParameters):
computes the following output values (cf. RMLPositionOutputParameters):
 at time instant
at time instant  consisting of
consisting of RMLPositionOutputParameters::NewPositionVector,
RMLPositionOutputParameters::NewPositionVector, RMLPositionOutputParameters::NewVelocityVector, and
RMLPositionOutputParameters::NewVelocityVector, and RMLPositionOutputParameters::NewAccelerationVector.
RMLPositionOutputParameters::NewAccelerationVector. in seconds (RMLPositionOutputParameters::SynchronizationTime), that is, the time which is required until all selected degrees of freedom reach their desired target state of motion
in seconds (RMLPositionOutputParameters::SynchronizationTime), that is, the time which is required until all selected degrees of freedom reach their desired target state of motion  .
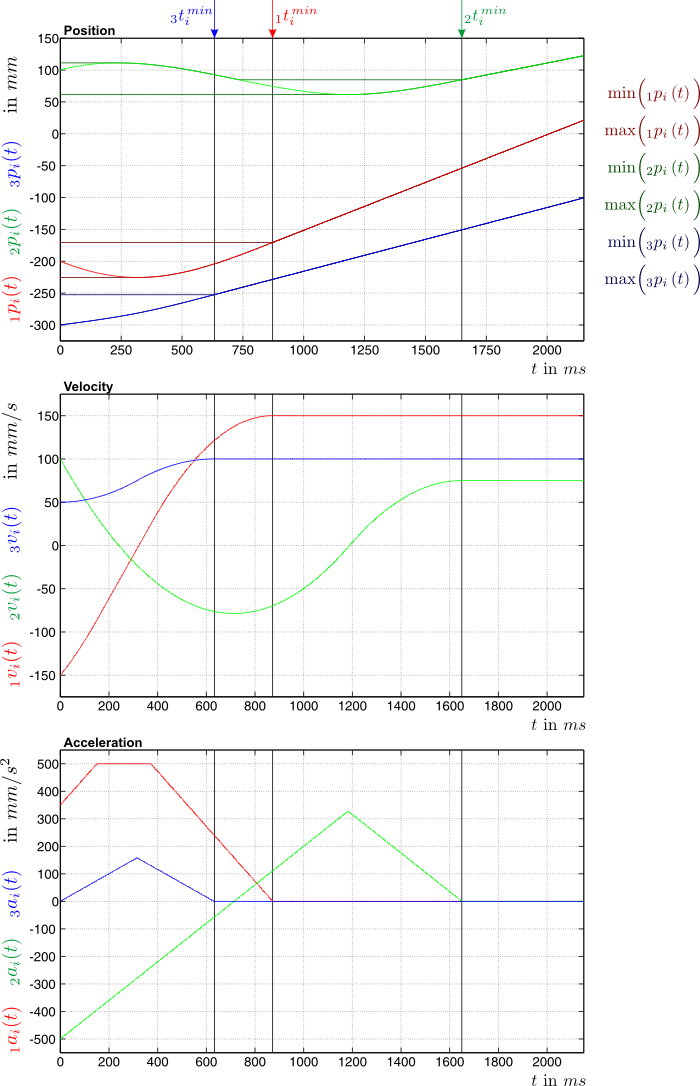
. RMLPositionOutputParameters::MinPosExtremaPositionVectorOnly and
RMLPositionOutputParameters::MinPosExtremaPositionVectorOnly and RMLPositionOutputParameters::MaxPosExtremaPositionVectorOnly.
RMLPositionOutputParameters::MaxPosExtremaPositionVectorOnly.
The position-based On-Line Trajectory Generation algorithm of the Type II Reflexxes Motion Library is called by the method ReflexxesAPI::RMLPosition().
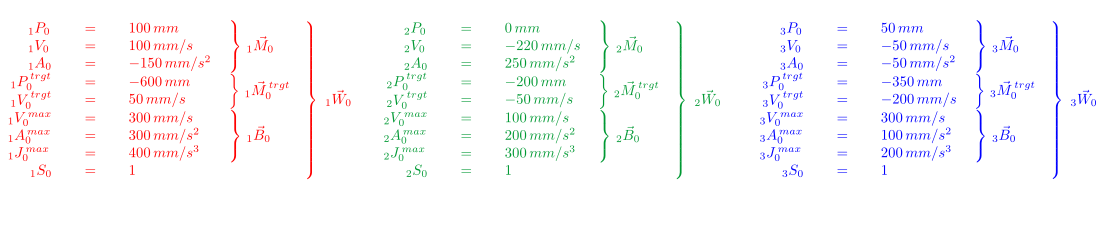
In this example (cf. Example 1 — Introduction to the Position-based algorithm), we assume to control a simple Cartesian robot with three translational degrees of freedom, and we apply the following input values at time instant .
Further examples can be found on pages
 and
and
For a program to set-up the corresponding input parameters please refer to the Example 1 — Introduction to the Position-based algorithm, to the Example 2 — Making Use of Output Parameters of the Position-based algorithm, and to the Screen Output of 02_RMLPositionSampleApplication.cpp.
The velocity-based Type II On-Line Trajectory Generation algorithm is executed by a call of ReflexxesAPI::RMLVelocity(), and its output values RMLVelocityOutputParameters are the very same as for the position-based algorithm (see above), but the values for the target position  and the maximum velocity vector
and the maximum velocity vector  are not considered, and the flag RMLPositionFlags::KeepCurrentVelocityInCaseOfFallbackStrategy is not available.
are not considered, and the flag RMLPositionFlags::KeepCurrentVelocityInCaseOfFallbackStrategy is not available.
For this second example (cf. Example 4 — Introduction to the Velocity-based algorithm), we again assume a very simply Cartesian robot with three translational degrees of freedom.

For a program to set-up the corresponding input parameters please refer to the Example 4 — Introduction to the Velocity-based algorithm, to the Example 5 — Making Use of Output Parameters of the Velocity-based algorithm, and to the Screen Output of 05_RMLVelocitySampleApplication.cpp.